
(1)
پروژه کنترلر حلقه بسته موتور القایی تغذیه شده توسط اینورتر سهفاز، به شبیه سازی کنترلر حلقه بسته یک موتور القایی تغذیه شده با اینورتر سهفاز (Inverter) می پردازد. اینورتر سهفاز وظیفه تبدیل ولتاژ متناوب سهفاز شبکه...
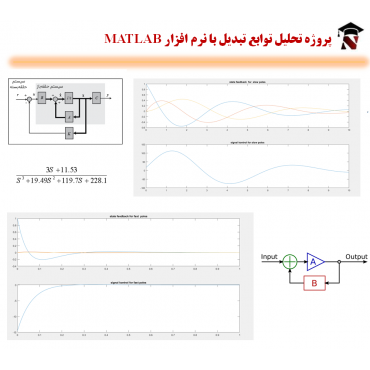
در این پروژه، سوالات و مباحث مختلفی، مانند محاسبه صفر وقطب ها، نمایش فضای حالت سیستم، کنترل پذیری و رویت پذیری، طراحی فیدبک و بهره فیدبک و ... بر روی یک تابع تبدیل حلقه باز نمونه مورد بررسی و مطالعه قرار گرفته است. این پروژه مناسب دانشجویان رشته مهندسی برق مخصوصا برای دروس کنترل مدرن و کنترل خطی مناسب است و به فهم بهتر مباحث بنیادی این درس کمک بسیار زیادی می کند.
پروژه کامل تحلیل توابع تبدیل در محیط نرم افزار متلب

بررسی اجمالی پروژه
در این پروژه، سوالات و مباحث مختلفی، مانند محاسبه صفر وقطب ها، نمایش فضای حالت سیستم، کنترل پذیری و رویت پذیری، طراحی فیدبک و بهره فیدبک و ... بر روی یک تابع تبدیل حلقه باز نمونه مورد بررسی و مطالعه قرار گرفته است. این پروژه مناسب دانشجویان رشته مهندسی برق مخصوصا برای دروس کنترل مدرن و کنترل خطی مناسب است و به فهم بهتر مباحث بنیادی این درس کمک بسیار زیادی می کند.
![]()
سوالاتی که در این پروژه به آن پاسخ داده شده است
· صفر ها و قطب های سیستم را (با استفاده از نرم افزار متلب) محاسبه کنید؟ آیا سیستم حلقه باز پایدار است؟ آیا سیستم مینیمم فاز است؟
· یک نمایش فضای حالت برای سیستم بدست آوردید؟
· کنترل پذیری و رویت پذیری نمایش فضای حالت بدست آمده را بررسی کنید؟ آیا امکان طراحی فیدبک حالت و رویتگر حالت برای این نمایش فضای حالت وجود دارد؟ اگر نمایش فضای حالت بدست آمده کنترل ناپذیر است، آن را به زیر سیستم های کنترل پذیر و کنترل ناپذیر تفکیک کنید همچنین اگر نمایش فضای حالت بدست آمده رویت ناپذیر است آن را به زیرسیستم های رویت پذیر و رویت ناپذیر تفکیک کنید.
· در صورتی که نمایش فضای حالت بدست آمده در قسمت قبل مینیمال نیست، یک نمایش فضای حالت مینیمال برای سیستم بدست آورید؟
· اگر سیستم حلقه باز بر اساس نمایش فضای حالت بدست آمده را با استفاده از فیدبک واحد منفی به صورت حلقه بسته پیاده سازی کنیم، پاسخ پله سیستم را رسم و قطب ها و صفرهای حلقه بسته را بدست آوردید؟
· برای نمایش فضای حالت بدست آمده برای سیستم، فیدبک حالت را چنان طراحی کنید تا قطبهای سیستم حلقه بسته در مکانهای دلخواهی در سمت چپ محور jw قرار بگیرند. پاسخ پله و متغیرهای حالت سیستم را رسم کنید. قطب ها و صفرهای سیستم حلقه بسته و حلقه باز را با یکدیگر مقایسه کنید. توجه: این مرحله را برای جانمایی قطب های دور و نزدیک انجام دهید و سیگنال کنترلی و بهره ی فیدبک حالت بدست آمده در دو حالت را با هم مقایسه کنید.
· برای نمایش فضای حالت بدست آمده یک ردیاب انتگرالی و یک ردیاب استاتیکی طراحی کنید.
· برای نمایش فضای حالت بدست آمده برای سیستم، یک رویتگر مرتبه ی کامل طراحی کنید. ملاک انتخاب قطبهای رویتگر حالت چیست؟ متغیرهای حالت سیستم و خطای تخمین را رسم کنید.
· برای نمایش فضای حالت بدست آمده برای سیستم، یک رویتگر کاهش مرتبه طراحی کنید. متغیرهای حالت سیستم و خطای تخمین را رسم کنید.
· سیستم حلقه بسته را با طراحی فیدبک حالت های تخمین زده شده، چنان طراحی کنید که قطبهای سیستم حلقه بسته سمت چپ محور jw بوده و پاسخ پله به لحاظ فراجهش و زمان نشست رفتار قابل قبولی داشته باشد. پاسخ پله و متغیرهای حالت سیستم را رسم کنید. در واقع فرض کنید، حالتهای سیستم در دسترس نبوده و باید از حالتهای تخمین زده شده برای فیدبک حالت استفاده شود.
· بهره فیدبک حالت بهینه سیستم را برای حداقل سازی تابع هزینه زیر برای مقادیر مختلف R و Q بدست آورید.




اولین نظر را شما ثبت کنید. ثبت نظر
اولین سوال را شما مطرح کنید. طرح سوال
سرور ابری نیمه خصوصی یا نیمه اختصاصی، عمدتا برای سایتهای فروشگاهی و با ترافیک بالا استفاده میشود. زیرا این سرورهای ابری نسبت به سرورهای مجازی قدرت و پایداری بیشتری دارند و تمام سخت افزارهای آن بطور خصوصی در اختیار کاربر قرار میگیرند. در بیشتر مواقع تفاوتی بین سرور نیمه خصوصی و سرور خصوصی دیده نمیشود و فقط هزینه تهیه و نگهداری آن پایین تر است. در نیوزپاور تنوع بینظیری از سرورهای ابری نیمه خصوصی یا نیمه اختصاصی ارائه شده است.
در سرور ابری اختصاصی ( Dedicated Server ) این امکان برای مشترک فراهم می آید که از تمامی ظرفیت CPU و RAM به همراه سایر امکانات سخت افزاری به طور کامل و بدون به اشتراک گذاشتن با دیگر مشترکین استفاده شود. این سرویس مناسب فروشگاه های خاص، پربازدید با نیازمندی های بخصوص است.
اگر به دنبال فضای ابری بکاپ با حافظه SSD Nvme واقعی قدرتمند از شرکت هتزنر آلمان برای وب سایت خود هستید. این سرویس مناسب شماست. یک نسخه زنده از وب سایت شما در این سرویس قرار می گیرد و در هر شرایطی قابلیت بازیابی و اتصال نیم سرور به این فضا وجود دارد.
این سرویس مناسب فروشگاه ها و وب سایت های تازه تاسیس و کم بازدید است. این سرویس از نظر فنی مشابه همان هاست اشتراکی است که 99% شرکت های ایرانی بعضا با قیمتی "گزاف" عرضه می کنند با این تفاوت که از نظر کیفی یک سر و گردن در سطح بالاتری قرار دارد. حافظه SSD Nvme، فضای کاملا ابری، امنیت و پایداری عالی همه چیز را برای ایجاد یک فروشگاه جدید فراهم می کند و دغدغه های شما را به حداقل می رساند.
ماژول پرستاشاپ در پلتفرم PrestaShop به ابزارهایی گفته می شود که قابلیتهای جدید و ویژگی های اضافی را به فروشگاه شما اضافه میکند. ماژول های پرستاشاپ میتوانند ویژگیهای متنوعی را شامل شوند مانند پرداخت آنلاین، ارسال محصول، مدیریت موجودی، گزارشدهی و غیره. با استفاده از ماژولها میتوانید فروشگاه خود را بهبود دهید، تجربه خرید را بهبود بخشید و قابلیتهای اضافی را به مشتریان ارائه دهید.
بیش از صدها ماژول پرستاشاپ در نیوزپاور وجود دارد که به شما کمک می کند تا فروشگاه آنلاین خود را سفارشی سازی کنید، ترافیک سایت را افزایش دهید، نرخ تبدیل را بهبود بخشید و وفاداری در مشتریان ایجاد کنید. این افزونه ها همگی توسط نیوزپاور خریداری شده اند و اصالت دارند. با مجموعه بی نظیری از افزونه های پرستاشاپ می توانید روند پیشرفت کسب و کار و بهبود فروش را تجربه کنید. هر ماژول یک قابلیت جدیدی را به فروشگاه شما اضافه می کند. هر ماژول مسیر جدیدی برای موفقیت به کسب و کار شما هدیه می دهد!
پرستاشاپ یک سیستم مدیریت وب سایت / فروشگاه آنلاین اپن سورس است که به شما کمک می کند به سرعت یک وب سایت فروشگاهی / شرکتی داشته باشید. در حال حاضر بیش از 300000 وب سایت فعال از پرستاشاپ استفاده می کنند. هسته قوی پرستاشاپ، آن را به یکی از پلت فرم های منبع باز محبوب جهان تبدیل می کند. ما در نیوزپاور با هنر طراحان ارشد خود و استفاده از فریم ورک پرستاشاپ، حرفه ای ترین وب سایت های روز جهان را برای شما طراحی می کنیم.
فهرست شرکت های تولیدکننده افزونه و ماژول پرستاشاپ و انواع قالب پرستاشاپ در جهان
برای شما اسامی کلیه شرکت های بین المللی پرستاشاپ فعال در سراسر جهان را فهرست بندی کردیم. ما در نیوزپاور برترین افزونه ها، قالب ها و ابزارهای مورد نیاز و ضروری پرستاشاپ را طراحی، خریداری، فارسی سازی و عرضه می کنیم. با نیوزپاور همیشه وب سایت خود را بروز و پویا نگه دارید.
لطفا ابتدا وارد شوید.
ورود به سیستم