پروژه شبیه سازی آماده با موضوع:
بهینه سازی مسیری ربات متحرک چرخ دار بوسیله کنترل بهینه
به همراه فایل شبیه سازی در محیط نرم افزار متلب+ مقاله مرتبط با آن
با استفاده از دستور bvp4c

شبیه سازی PLL در سیمولینک متلب - Phase-locked loop
شناسه محصول:
NP-239188
شبیه سازی PLL در سیمولینک متلب - Phase-locked loop
PLL یا Phase-Locked Loop (فاز قفل شده کننده مدار) یک سیستم کنترل الکترونیکی است که خروجی فرکانس یا فاز یک اسیلاتور را با فرکانس یا فاز ورودی تنظیم میکند.
این پروژه مناسب برای کار کلاسی یا استفاده در پروژه های شبیه سازی و پایان نامه شماست و از کیفیت عالی برخوردار است.
نام تجاری:
شاخه های محصول:
محصولات مرتبط

(1)
پروژه کنترلر حلقه بسته موتور القایی تغذیه شده توسط اینورتر سهفاز، به شبیه سازی کنترلر حلقه بسته یک موتور القایی تغذیه شده با اینورتر سهفاز (Inverter) می پردازد. اینورتر سهفاز وظیفه تبدیل ولتاژ متناوب سهفاز شبکه...
99,000 تومان
پروژه برنامهریزی دینامیکی تمرین 3.24 کنترل بهینه کرک پروژه داینامیک پروگرمینگ تمرین 3.24 کنترل بهینه kirk شبیه سازی کامل تمرین مهم 3.24 از کتاب کنترل بهینه دونالد. ای. کرک در محیط نرم افزار MATALB
99,000 تومان
پروژه برنامهریزی دینامیکی تمرین 3.21 کنترل بهینه کرکپروژه داینامیک پروگرمینگ تمرین 3.21 کنترل بهینه kirkشبیه سازی کامل تمرین مهم 3.21 از کتاب کنترل بهینه دونالد. ای. کرک در محیط نرم افزار MATALB
99,000 تومان
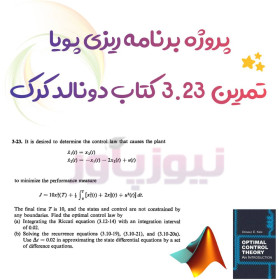
پروژه برنامه ریزی پویا تمرین 3.23 کتاب دونالد کرک بخش 3.23 از کتاب کنترل بهینه دونالد. ای. کرک (تمرین 3.23)در محیط نرم افزار MATALBتمرین Donald E. Kirkبه همراه گزارش کار فارسی با فرمت ورد به همراه چهار فایل شبیه سازی...
99,000 تومان
پروژه برنامهریزی دینامیکی تمرین 3.15 الی 3.17 کنترل بهینه kirkسه تمرین مهم 3.15 و 3.16 و 3.17 از کتاب کنترل بهینه دونالد. ای. کرک در محیط نرم افزار MATALBحل و شبیه سازی سه تمرین کتاب کنترل بهینه دونالد کرک در این محصول!


69,000 تومان
شبیهسازی برنامهریزی دینامیکی تمرین 3.14 کتاب کنترل kirk بخش 3.14 از کتاب کنترل بهینه دونالد. ای. کرک (تمرین 3.14)در محیط نرم افزار MATALBبه همراه گزارش کار فارسی با فرمت ورد به همراه چهار فایل شبیه سازی در متلب

49,000 تومان
پروژه الگوریتم TLBO در متلب + آموزش گام به گام در قالب یک فایل Mfile آموزش الگوریتم TLBO را به شما هدیه می دهد و در قالب یک فایل گزارش فارسی به آموزش گام به گام این پروژه می پردازد. شما می توانید از این الگوریتم در...
