بررسی اجمالی پروژه
کنترل فازی ربات متحرك چرخدار برای دنبال کردن یک مسیر از پیش تعیین شده با متلب
در این پروژه شبیه سازی متلب به کنترل یک ربات متحرک با استفاده کنترلر فازی پرداخته میشود. دو مسیر دایرهای و مربعی برای آن در نظر گرفته شده و مقاومت آن در برابر یک سری عوامل و فاکتورها بررسی میگردد.

تعریف مسئله در پروژه
کنترل فازی ربات متحرك چرخدار برای دنبال کردن یک مسیر از پیش تعیین شده با متلب
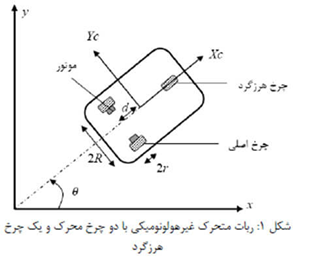
ربات متحرک چرخ دار از متداول ترین ربات هایی است که در مهندسی کنترل کاربردهای آزمایشگاهی و عملی فراوانی دارد. در شکل زیر یک ربات متحرک غیرهولونومیکی با دو چرخ محرک و یک چرخ هرزگرد نشان داده شده است.
معادلات دینامیکی حاکم بر این سیستم عبارتند از :
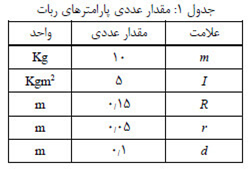
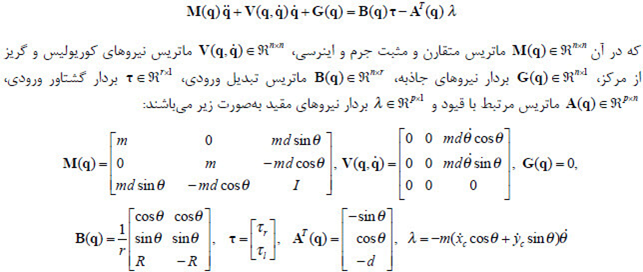 که در آن m جرم ربات, d فاصله مرکز ثقل ربات از محور واصل چرخ ها, R نصف فاصله دو چرخ, r شعاع هر یک از چرخ ها, [xc,yc] مختصات مرکز جرم ربات, q=[Xc,Yc,teta]^T و I ممان اینرسی بدنه ربات حول محور عمود بر سطح زمین و گذرنده از مرکز ثقل ربات می باشد, مقدار پارامترهای ربات در جدول 1 داده شده است.
که در آن m جرم ربات, d فاصله مرکز ثقل ربات از محور واصل چرخ ها, R نصف فاصله دو چرخ, r شعاع هر یک از چرخ ها, [xc,yc] مختصات مرکز جرم ربات, q=[Xc,Yc,teta]^T و I ممان اینرسی بدنه ربات حول محور عمود بر سطح زمین و گذرنده از مرکز ثقل ربات می باشد, مقدار پارامترهای ربات در جدول 1 داده شده است.
معادلات سینماتیکی این ربات نیز عبارت است از :
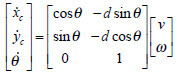
که در آن v سرعت خطی و امگا سرعت زاویه ای ربات است.
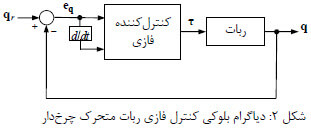
هدف از اجرای این پروژه, کنترل ربات برای دنبال کردن مسیر از پیش تعیین شده ای می باشد, شکل زیر.
براي مسیر دلخواه از یک مسیر دایره اي، (مثل مسیر زیر) و یک مسیر مربعی دلخواه استفاده کنید. سرعتهاي خطی Vr و زاویه ای امگا آر دلخواه را به طور مناسب تعیین کنید. موقعیت اولیه ربات را با فاصله از مسیر دلخواه قرار دهید.
یک) قوام کنترل کننده در مقابل:
الف) تغییر پارامترهاي سیستم، ب) نویز اندازه گیري، پ) اشباع در سیگنال کنترلی، ت) اغتشاش خارجی
دو) حجم محاسباتی و امکان پیاده سازي بیدرنگ آنها

گزارش شبیه سازی با نرم افزار متلب
شبیه سازی در محیط ام فایل و سیمولینک متلب انجام شده و توسط کارشناسان مجرب نیوزپاور کدنویسی شده است.
* این پروژه شبیه سازی دارای گزارش ورد 10 صفحه ای به زبان فارسی است.
* شبیه سازی برای دو حالت مسیر دایره ای و مربعی در دو پوشه مجزا به همین نام ها تشکیل شده است.
* در ادامه نتایج شبیه سازی مربوط به هر کدام را مشاهده می کنیم.

نتایج شبیه سازی پروژه
کنترل فازی ربات متحرك چرخدار برای دنبال کردن یک مسیر از پیش تعیین شده با متلب
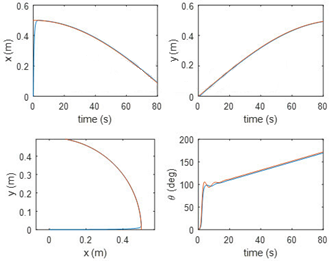
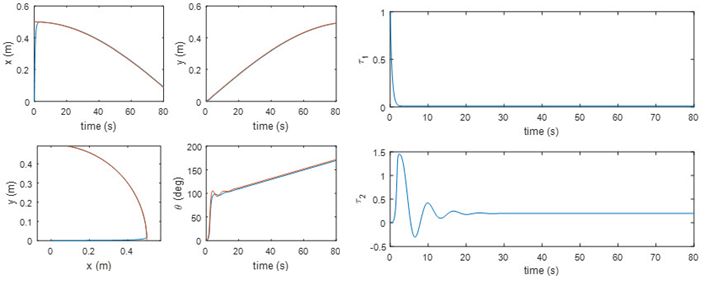
مسیر دایره ای: شبیه سازی در 80 ثانیه برای ربع دایره انجام شده است. نتایج نشان دهنده این است که ربات به خوبی مسیر مرجع را تعقیب نموده است:
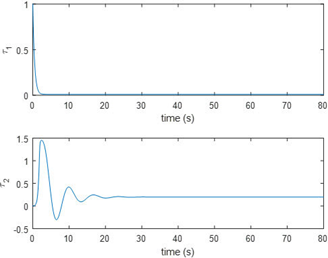
همچنین ورودیهای کنترلی در ادامه نمایش داده شده است. ملاحظه میگردد که هر دو ورودی در محدوده مناسب قرار دارند:
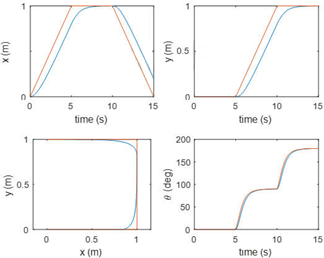
حال نتایج مسیر مربعی را نشان میدهیم. ملاحظه میشود که نتایج مشابه حالت قبل به دست می آیند:
حال به بررسی مقاومت کنترلر در برابر عوامل زیر میپردازیم:
یک) تغییر پارامترهای سیستم
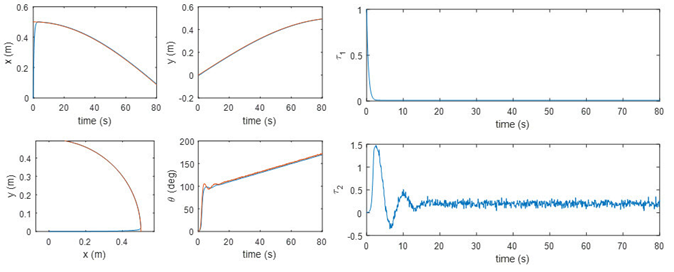
برای این منظور، جرم و ممان اینرسی ربات را دو برابر میکنیم. نتایج برای مسیر دایرهای نمایش داده شدهاند. ملاحظه میشود که نتایج همچنان بدون تغییر مانده اند:
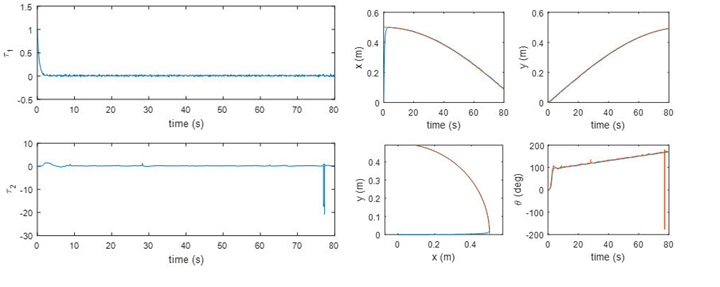
دو) نویز اندازه گیری
سه) اشباع ورودی کنترلی
در نمودارها ملاحظه گردید که ورودیهای کنترلی در حدی نیستند که وارد محدوده اشباع شوند لذا نیازی به اشباع ورودیها نمیباشد.
چهار) اغتشاش خارجی
همچنین در مورد حجم محاسباتی این نکته ذکر میگردد که مدل ارائه شده قابلیت اجرایی شدن بر روی سیستم واقعی را دارد و حجم محاسبات آن نیز مطلوب است (حجم محاسباتی بالایی ندارد).
جمع بندی پروژه کنترل فازی یک ربات متحرك چرخدار برای دنبال کردن یک مسیر از پیش تعیین شده با متلب
در این پروژه به کنترل فازی یک ربات متحرک پرداخته شد. دو مسیر مرجع دایره و مربع ساخته شد و ربات به خوبی هر دو مسیر را تعقیب نمود. به علاوه کنترلر در مقابل تغییرات پارامتر سیستم، نویز، اشباع و اغتشاش خارجی مقاومت خوبی دارد. به علاوه این که حجم محاسبات نیز مطلوب است.