کتاب "کنترل بهینه" اثر دونالد ای. کرک (Donald E. Kirk)، یک منبع ارزشمند در زمینه برنامهریزی دینامیکی و کنترل بهینه است. این کتاب به مباحث مرتبط با کنترل بهینه، مدلسازی سیستمها، تئوری بازیها و الگوریتمهای بهینهسازی میپردازد.
یکی از تمرینات موجود در این کتاب، شبیهسازی برنامهریزی دینامیکی است. در این تمرین، شما باید یک مسئله بهینهسازی را با استفاده از روشهای برنامهریزی دینامیکی حل کنید. این مسئله معمولاً شامل محدودیتها و تابع هدف است که باید با استفاده از الگوریتمهای بهینهسازی، بهترین راهحل ممکن را بیابید.
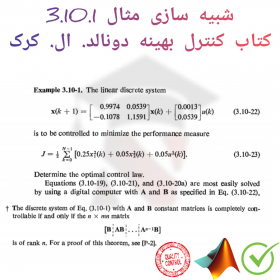
برای شبیهسازی این تمرین، شما باید از یک زبان برنامهنویسی مانند MATLAB یا Python استفاده کنید. در ابتدا، باید مسئله بهینهسازی را مدلسازی کنید، شامل تعریف متغیرها، تابع هدف و محدودیتها. سپس با استفاده از روشهای برنامهریزی دینامیکی مانند برنامهریزی پویا، الگوریتم دینامیکی برنامهریزی خطی (DP-LP) و سایر روشهای مشابه، بهینهسازی را انجام میدهید. این پروژه شبیه سازی ارائه شده در نیوزپاور (تمرین 3.18) با استفاده از نرم افزار متلب انجام شده است.
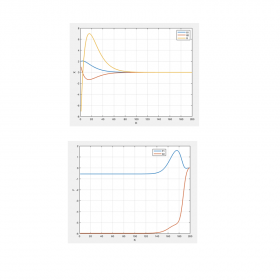
با اجرای شبیهسازی، میتوانید نتایج بهینهسازی را دریافت کنید و با تحلیل آنها، بهترین راهحل برای مسئله را مشخص کنید. این نتایج میتوانند شامل مقادیر بهینه متغیرها، تابع هدف در بهترین حالت، و نحوه تحقق محدودیتها باشند.
به طور خلاصه، شبیهسازی برنامهریزی دینامیکی تمرینی است که در کتاب "کنترل بهینه" ارائه شده است. این تمرین شامل مدلسازی مسئله بهینهسازی و استفاده از الگوریتمهای برنامهریزی دینامیکی برای یافتن بهترین راهحل ممکن است.